Lego Mindstorm ev3 その後です。
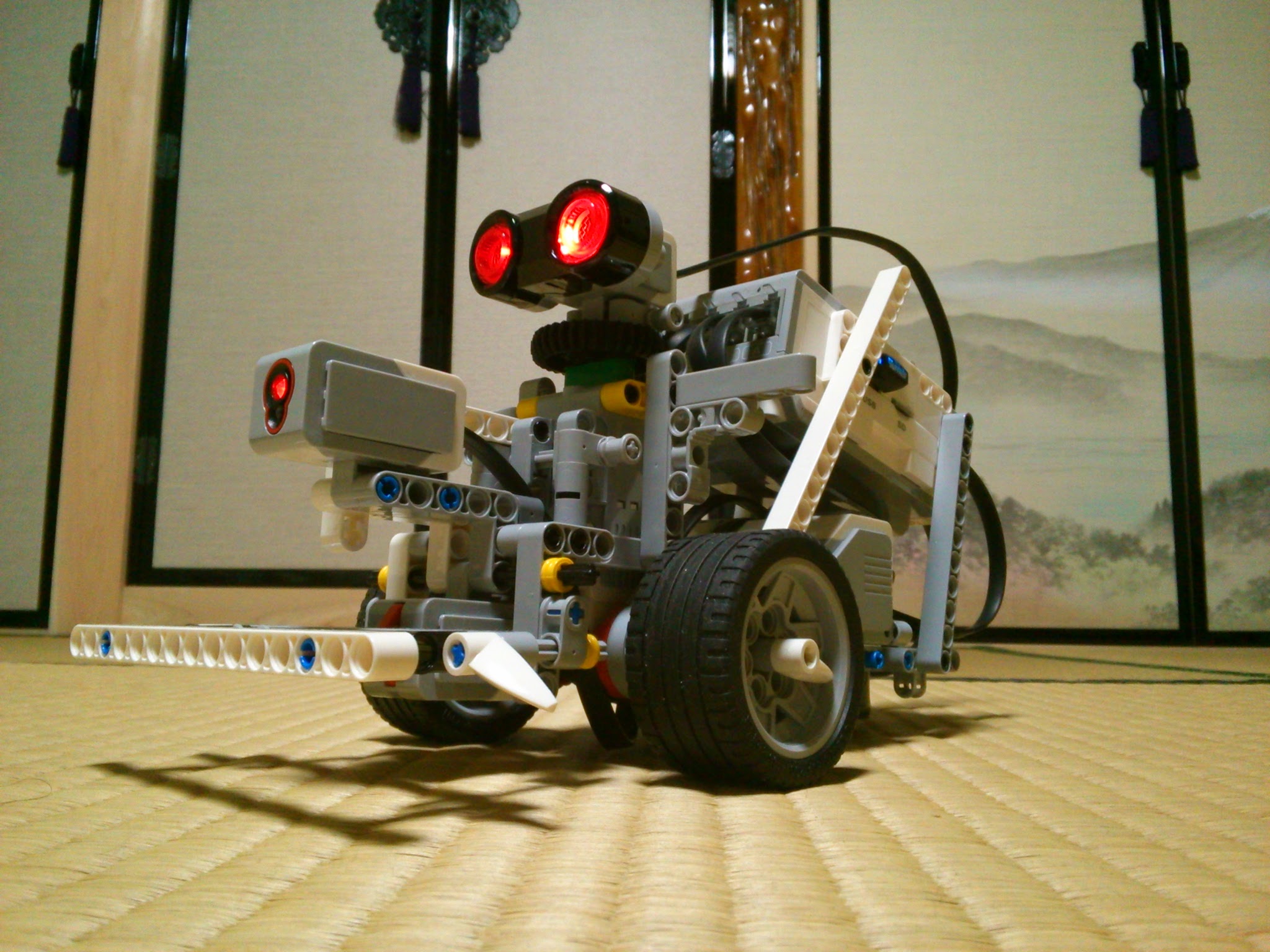
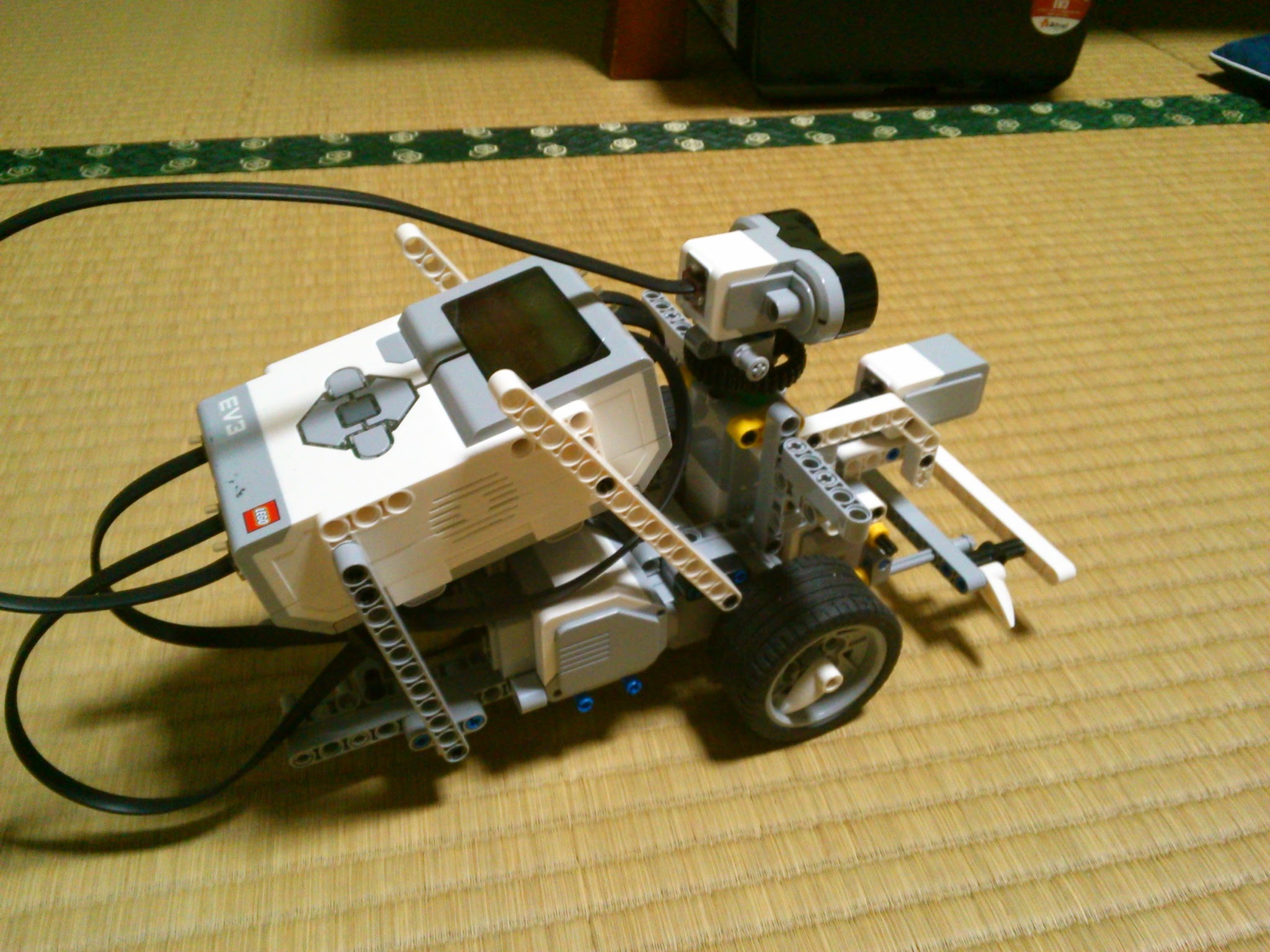
しばらく時間が取れなくて触っていなかったevo3ですが、とりあえず、超音波センサーの首振り機能を追加しました。斜めに壁に向かうと超音波センサーが役に立たないからです。
 |
 |
最初に360度本体を回転させて、周囲の障害物を1.5m程先までスキャンして、障害物の無い方向を目指します。50cm以内に障害物を検知すると、再度、360度本体を回転させて、障害物の無い方向を目指す訳ですが、走行中の斜め50cmが、壁に擦れ擦れだとうまくいかない訳です。
Medium Servo Motor のCounterを使用して回転角を取得することで、左右45度の範囲で超音波センサーを振ります。とりあえず、今回は、そこまでで、この次は、超音波センサーが障害物を検出した時の角度から、方向転換の動作に結び付けようと思います。
今日はここまで。